目次
当社開発の制御ブランド「MAMORU」
当社は全国の機器メーカー様の技術パートナーとして、制御システム、モーター、駆動機器、配管機器などの開発・製造を⾏なっております。それらの事業で培った技術や経験を⽣かし開発したのが制御技術ブランド「MAMORU」です。「MAMORU」という名前には、この技術をご活⽤頂くことで、さまざまな製品を通して、会社、個⼈や社会の課題を認識し、解決したいという想いが込められております。技術開発を促進し、技術⼤国としての中⼩企業全体の技術⼒向上に貢献させて頂く所存です。
■サービス概要
・ニーズに応じた制御システム及び構成製品のカスタマイズ
・最も相応しい制御技術の実装
・弊社標準設計品のご紹介
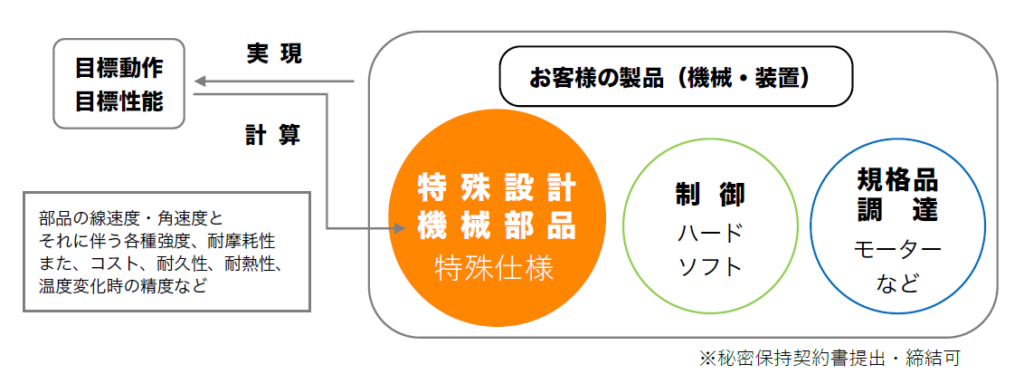
・製品仕様に合った最適な材質や形状のご提案
・人的リソース不足の解消
・新しい価値創出のサポートとして
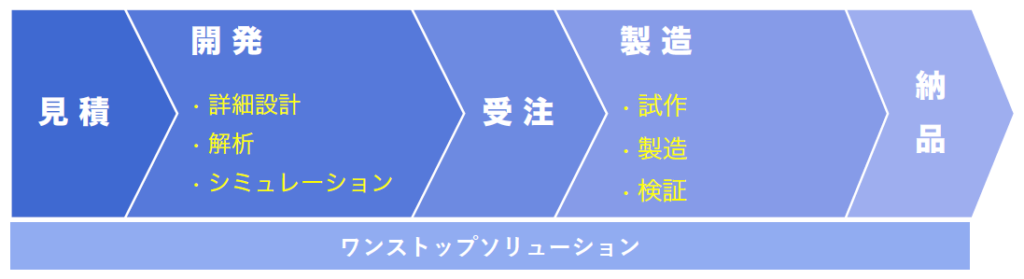
お客様のお悩みを解決すべく、⽬的や制約条件から逆算し、加工実現性・コストを踏まえた最適な設計についてご提案させて頂きます。設計相談や試作から承ります。開発のみ、製造のみの案件も対応しております。
エンジニアリングカンパニーである当社は、
開発から製造までを一貫して行うことができます。

ヨシロ機工の開発製造受託サービスの特徴1:高い開発力
ヨシロ機工の開発製造受託サービスの特徴2:低コスト・高品質
海外の自社工場を拠点として製造するため、低価格・高品質を実現します。
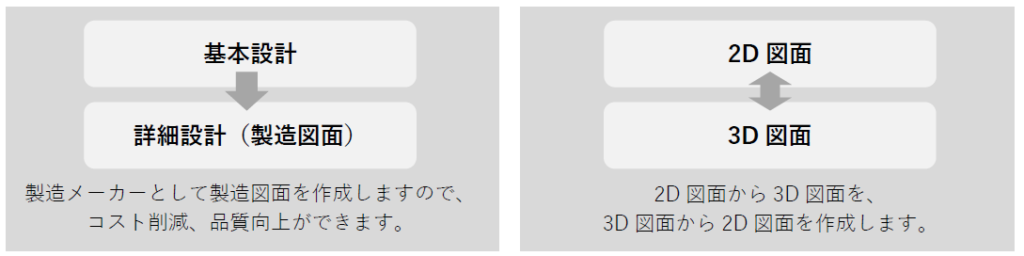
■詳細設計
製造時のバラツキやミスを考慮し、つくり易さに配慮した図面作りを行い、この図面をもとに開発時の品質保証を実現しています。
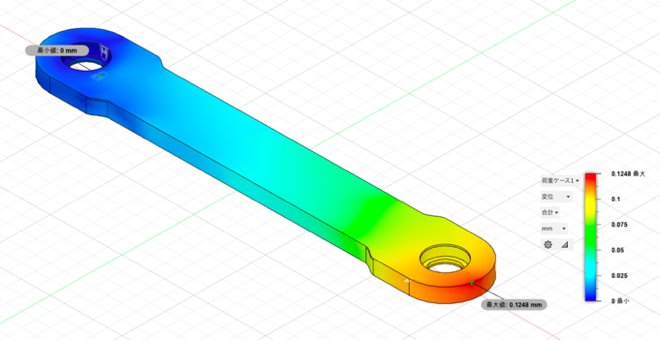
■解析・シミュレーション
CAEソフトウェアで部品形状、材質をモデリングし、さまざまな条件下で部品に対し解析・シミュレーションを行います。この作業により、試作以前の作り込みを来ない、コスト削減・品質向上を実現します。
●有元素法(FEM)解析
静的応力、モード周波数、熱分布・熱応力、座屈、非線形応力
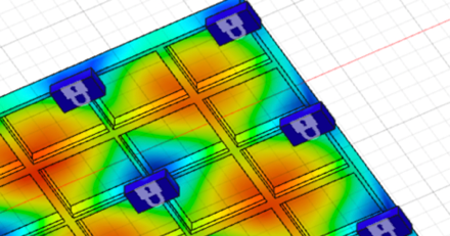
事例:パターン化された条件下で定盤のリブの最適化を行います。応力や変形などを分析し、最適なリブの厚みやピッチを研究。
事例:半導体装置などでは、部品に対しても高い精度が要求されます。ですが、半導体製造工程では温度変化が存在するので、耐熱溶射加工を行い、穴ピッチ精度を向上。
数値解析ソフトウェアで物理システムをモデリングし、各種物理要素の関係性などを解析します。
●物理モデルシミュレーション
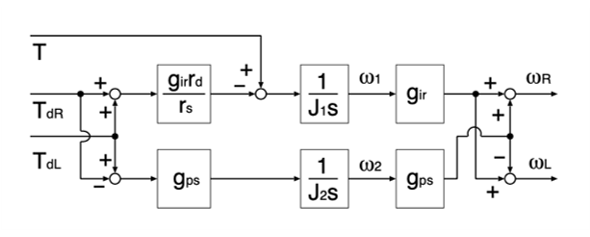
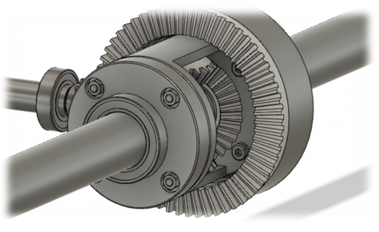
事例:複数の歯車などで構成される駆動機器の角速度や発生トルクなどをモデル化。
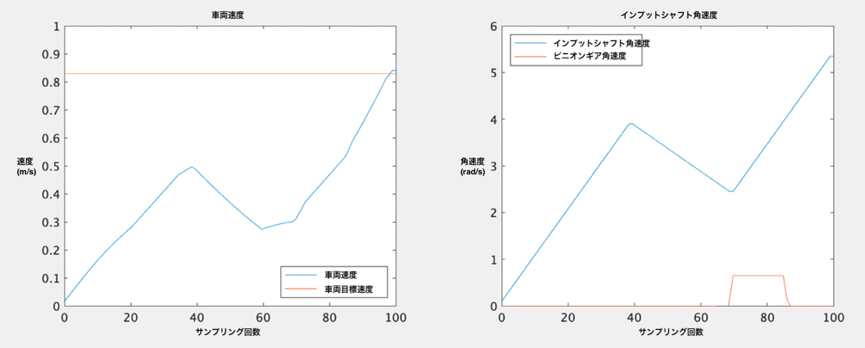
事例:複数の歯車などで構成される駆動機器の各要素をグラフ関係にて出力。
■試作・設計・部品加工
青島工場・大連事業所を拠点とし、海外で生産を行います。海外に自社拠点を持っているため、高品質・低価格で生産が可能です。幅広い製造実績があるため、小さな部品から大きなフレームなどまで幅広く対応可能です。
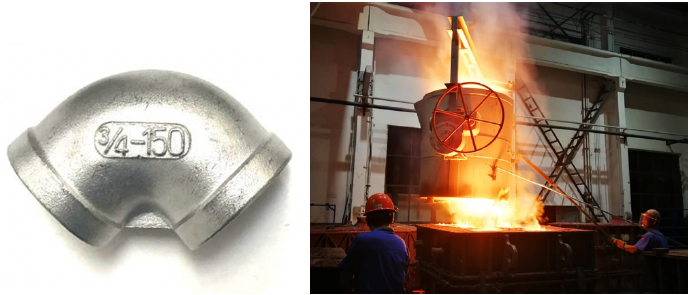
鋳造(大型鋳造、ロストワックス、焼結、ダイキャスト)
青島工場設備例:5.0t高周波誘導、12t/h固定砂ミキサー、25t/h移動砂ミキサー、VS10破砕再生設備、60t引張試験機、光スペクトラムアナライザ金属成分分析装置など

機械加工(マシニング、旋盤、偏心軸)
青島工場設備例:門型マシニングセンター(2500×6000)、五面体マシニングセンター(2000×4000)、各種サイズ旋盤など

製缶(溶接、曲げ)
青島工場設備例:NCプラズマフレーム切断機、NCコイリングマシン自動溶接機(TIG+MIG)など

熱処理
青島工場設備例:30t全自動天然ガス熱処理炉、ガス熱時効処理炉(100t)など

表面処理(溶射、メッキ)
取扱表面処理例:各種汎用メッキ、繊維型耐摩耗性溶射、密閉型耐摩耗性溶射、硬質表面溶射、潤滑性溶射、導電性環境保護溶射、絶縁性溶射、遮熱溶射、粘着防止性溶射
■モデルベースデザイン
モデルベースデザインとは、コンピュータ上で作成するモデルを用いることで、複雑な組込みシステム開発の効率化・短時間化を図る開発手法です。
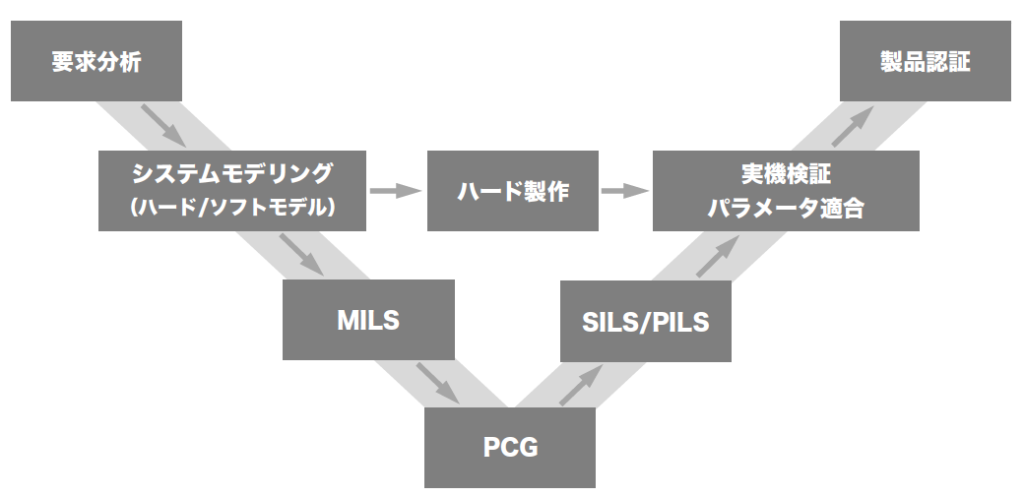
| 手法 | 目的 |
| MILS (Model in the Loop Simulation) | 要求設計やシステム設計で制御モデルの機能妥当性を検証する。 |
| SILS (Software in the Loop Simulation) | 制御モデルから生成したプログラミング言語の動作を検証する。 |
| PILS (Processor in the Loop Simulation) | CコードをターゲットMCU上のプロセッサの実行バイナリに置き換え、プロセッサの動作を検証する。 |
| PCG (Product Code Generation) | 確認されたコントローラーモデルから自動コード生成する。 |
ヨシロ機工ホームページをご覧いただきありがとうございます。
お客様のご期待に添えるよう社員一同、努力してまいる所存です。
ご質問などございましたらぜひお気軽にお問合せください。
お問い合わせ:https://www.yoshirokiko.jp/contact/
HPトップ:https://www.yoshirokiko.jp/
自社工場:https://www.yoshirokiko.jp/factory/
会社情報:https://www.yoshirokiko.jp/company/
■制御方法
●フィードバック制御
目標値に現在値を一致させるようにする制御です。一般的なブロック線図は以下の図のようなります。
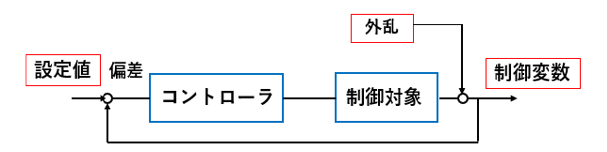
制御対象に外乱が入ると、偏差(設定値と制御量の差)が発生します。フィードバック制御は偏差が発生してから、その偏差を打ち消すように働いています。偏差は外乱が発生し、制御変数に変化が現れてから検出されます。その偏差によって、コントローラが働き、さらに制御対象を経由した後に制御動作を開始します。
| 利点 | 欠点 |
| 変動の影響を受けて制御動作を始めるため、外乱やモデルの誤差がある場合でも、ある程度その悪影響を抑制することができる | 制御動作の開始が遅れてしまうため、すばやく外乱の補填ができない |
●カスケード制御
フィードバック制御において制御変数が変化する以前に、コントローラが外乱の存在を知ることができれば、制御操作の開始が早まり、より優れた制御成績を収めることができる可能性が高まります。それを実現できるものとしてカスケード制御があり、以下の図のように二重のループを形成しています。
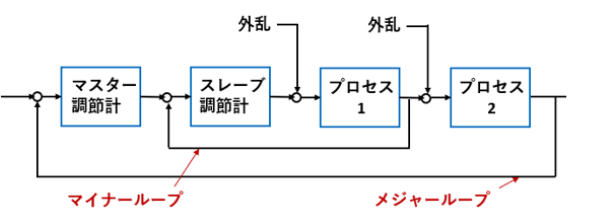
カスケード制御は、メジャーループの制御変数をより良く制御することが主目的です。マイナーループはその制御成績を改善する役割があります。この制御はマイナーループの応答がメジャーループの応答に比べて速い条件下において有効に働き、この条件を満たしている場合にはマイナーループに入った外乱はマイナーループで制御され、メジャーループの制御変数に影響を与えません。このような制御を行うため、操作量(制御対象へ加える量)に入る外乱を制御量に影響が現れる前に補償することができます。
●フィードフォワード制御
外乱をすばやく対処する制御にはフィードフォワード制御というものもあります。一般的なブロック線図は以下の図のようになります。
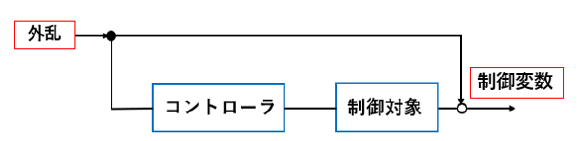
外乱により制御変数が変化するため、この変化を打ち消すようにフィードフォワード制御コントローラの特性を作る必要があります。コントローラの特性と制御対象の特性が適合していない場合には、その部分が偏差となって現れることになります。実際のプロセス内で生じる変動の状況を確認できないため、外乱や誤差に非常に弱いという欠点があり、フィードバック制御と逆の性質を持つことがわかります。
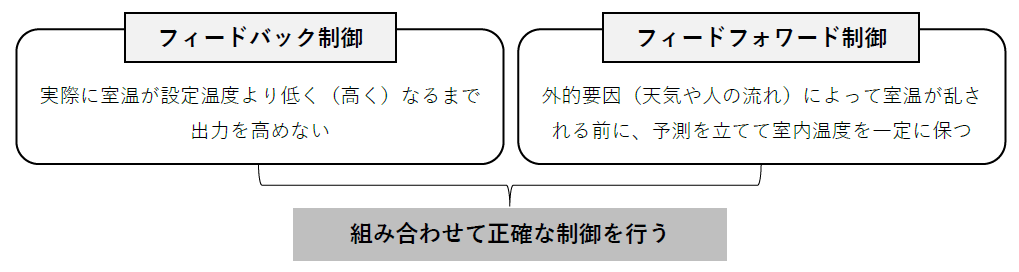
【フィードバック制御とフィードフォワード制御を組み合わせる】
| フィードバック制御 | フィードフォワード制御 | |
| 安定性 | ○ | △ |
| 応答速度 | ○ | ◎ |
| 外乱への対応 | ○ | × |
フィードバック制御とフィードフォワード制御は互いに異なった性質を持つため、これらを適切に組み合わせ、コントローラの性能を高めて用いられる例が多くなっています。
Ex)エアコンの温度設定
●ロバスト制御
モデル化誤差やパラメータ変動などの制御対象の不確かさ(これは摂動と呼ばれる)を設計段階から許容し、粗い近似モデルに基づく制御でも性能が保証できるよう、頑健な(robust)制御系を設計する手法全般を指します。
・構造化摂動:メカニカル系におけるばね定数や質量、粘性摩擦といった物理パラメータの変動
・非構造化摂動:モデル化できない摂動(乗法的摂動と加法的摂動)
情報的摂動Δ_m・・・P’=(1+Δm)P
加法的摂動Δ_a・・・P’=P+Δ_a
P’:摂動を含む制御対象
P:ノミナルモデル(摂動を0としたときのモデル)
・ロバスト安定化問題:すべての摂動に対して制御系の安定性を保証する問題のこと
・ロバスト性能問題:すべての摂動に対して制御性能を保証する問題のこと(ロバストが安定していることが前提となるため難しい)
長所:制御対象の摂動に対して、安全性や制御性能を保証した制御器が求まる
短所:理論が難解であったり、設計手順が複雑になったりすることがある
実用例:自動車の各種制御系、ハードディスク装置への適用
●H∞制御
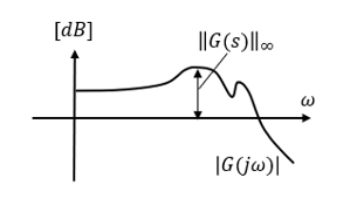
外乱応答の周波数特性の最小化を図ることにより、外乱に強い制御系を設計できるという特徴を持ちます。安定伝達関数G(s)のH∞ノルムは
||G(s)||∞≦supω|G(jω)|であり、H∞ノルムは伝達関数の周波数応答の最大振幅となっています。ここで、supは上限値を意味し、最大値と置き換えることができます。つまり|G(jω)|≦||G(s)||∞,∀ωであると示すことができます。
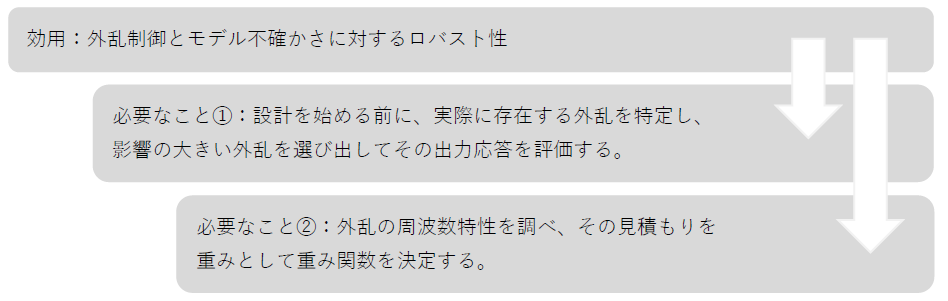
長所:数値モデルと実際の制御対象の間に誤差があっても、実際の制御対象を安定化するコントローラを設計できる。周波数領域で制御使用を記述できる
短所:時間応答との対応は直接ではない
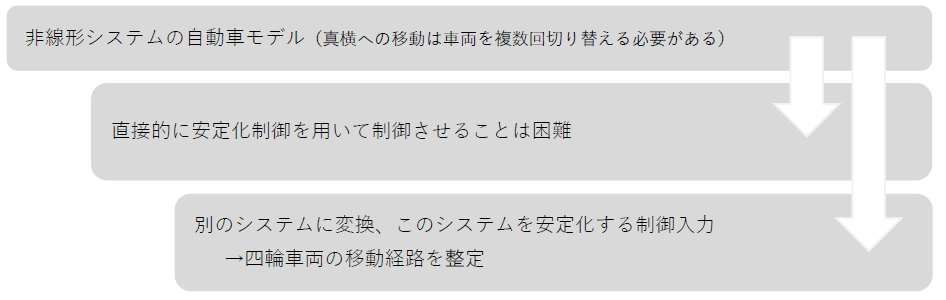
実用例:四輪車両の外乱抑制制御など
Ex)四輪車両の外乱抑制制御

●ファジィ制御
制御対象の動特性を把握し、それに基づき制御を実現するモデルに基づくファジィ制御・・・ファジィ集合で表現した制御規則をif…then〜(もし…ならば〜せよ)形式で表現されるファジィモデルでいくつか作っておき、現実の状態が各ルールのif…部分に適合する度合いを求め、その度合いに⾒合った制御を進めていきます。
熟練者のノウハウを巧みに規則化し、熟練者並の制御性能を実現する⾼度知識に基づくファジィ制御・・・⼈間の⻑年のノウハウや⼈間の勘、コツなど定量的に表現できないデータを扱う場合には、⼈間が普段⽤いる曖昧な(fuzzy)⾔葉(例えば「もう少し」という⾔葉)を含むことがありますが、そのような意味を汲み取って機器で具現化することができるという特徴を持ちます
長所: ⾼度な数学技術は必要なく、現代制御理論を⽤いることで 容易に⾮線形制御が可能になる 。
短所: 初めに⾮線形システムからファジィモデルを構築する必要がある。設計によっては制御性能が保守的になる可能性がある。
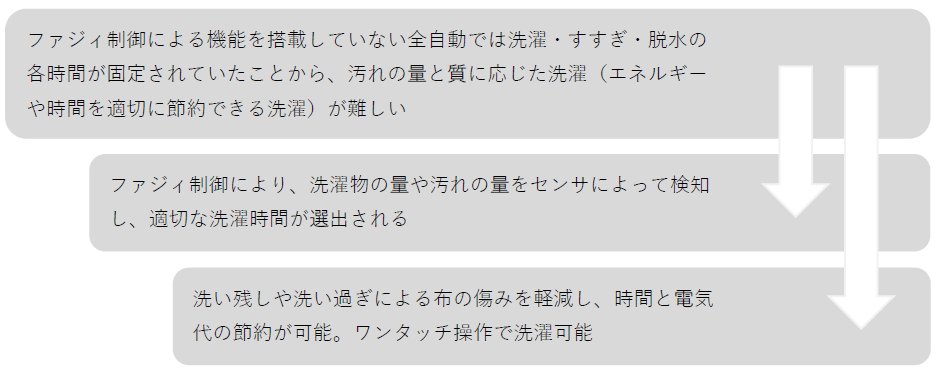
実⽤例 : 家電への応⽤、発電プラントの制御など
Ex)全自動洗濯機への適用例
ヨシロ機工ホームページをご覧いただきありがとうございます。
お客様のご期待に添えるよう社員一同、努力してまいる所存です。
ご質問などございましたらぜひお気軽にお問合せください。
お問い合わせ:https://www.yoshirokiko.jp/contact/
HPトップ:https://www.yoshirokiko.jp/
自社工場:https://www.yoshirokiko.jp/factory/
会社情報:https://www.yoshirokiko.jp/company/
■実用例
●プロセスプラント制御

プロセスプラント制御とは、化学⼯業や鉄鋼の各プロセス(化学⼯業であれば反応、吸収、分離、精製、蒸留、加熱、圧縮などのプロセス)を対象とした制御のことです。
化学プロセスは、反応器・分離器・蒸留器・熱交換器・タンク・圧縮機・ポンプなどの多くの設備機器が配管によって接続され、構成されていますが、運転を⾏う際には以下の要件を満たす必要があります。
| 要件 | 内容 |
| 安全運転 | 圧⼒や温度などの運転条件を適切な範囲に保ち、異常時には必要な保安措置を⾏う。 |
| 環境保護・法令順守 | リサイクルなどにより、廃棄物を最⼩化し、排出物質は法規で定められた基準に従うようにする。 |
| 品質確保 | 製品品質のばらつきを抑え、規格に適合させたり、新製品を速やかに開発・試作・⽣産できるようにする。 |
| 運転容易性 | ⽣産量の変更や製品銘柄の切り替えを⾃動的に⾏い、運転をつかさどるオペレータの負担を軽減し、確実に運転調整できるようにする。 |
| 生産性向上 | ⽣産量を最適化し、⾼効率で⽣産する。 |
| 経済性追求 | 省資源・省エネルギーなどの合理化を図り、常に経済的な運転を⾏う。 |
しかし、プロセスは絶えず外部の影響を受けており、⽣産量・原料性状・触媒活性・装置の特性・汚れや詰まり・気象条件などの変動により、プロセスの状態が変化します。
外乱と呼ばれるこれらの要因を補償し、望ましい運転条件に保つようにすることがプロセス制御には要求されます。以下にプロセス制御に要求される性能を⽰します。
| 性能 | 内容 |
| 安定化 | プロセスを適切な運転条件近傍で安定化する。不安定プロセスは制御によらなければ安定化できない。 |
| 目標値追従性 | ⽬標値の変更に対する速応性を確保する。 |
| 外乱抑制性 | 外乱による制御量(制御したい物理量)の変動を抑える。 |
| オフセットフリー | 定常偏差(制御系に⼊⼒を与え、定常状態になった時の⼊⼒に対する出⼒値の差分)が⽣じない。 |
| ロバスト性 | 運転条件やプロセス特性などの変化に対して、制御システムの安定性を保ち、制御性能低下を抑える。 |
●電動パワーステアリング(EPS)
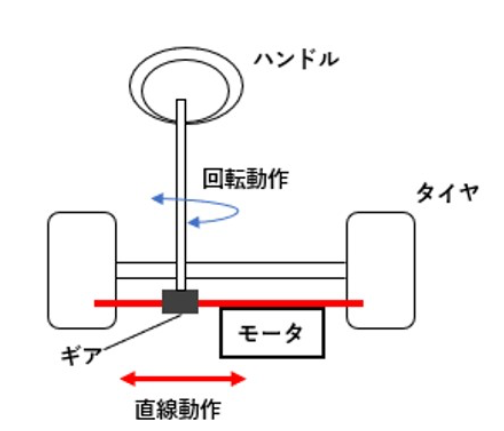
EPS は⾃動⾞のハンドル操作に必要な運転者の⼒をモータによって軽減する機器です。ハンドルを操舵することで、電気の⼒を利⽤してタイヤを任
意の⽅向に変えることができます。ステアリングシステムによって運転者の意思に基づく操作が可能になると期待されています。
| 設計手順 | 内容 | |
| 1 | 基本補正制御設計 | モータ慣性モーメントを主とするネガティブな動特性を補正するとともに安定性を確保する基本フィルタを設計する。 |
| 2 | アシスト制御設計 | ⾞両の⾛⾏特性に応じて、⾞両速度ごとの操舵トルク反⼒を⽬標値として、操舵トルクに対応したモータのアシスト性を設計する。 |
| 3 | 車両運動制御設計 | ⾞両の基本運動特性に応じて、操舵ダンパ、ハンドル戻り効果などを付与し、⼈間-⾃動⾞系の動特性を向上させるアシスト特性を設計する。 |
| 4 | 微調整 | 実⾛⾏によって制御パラメータを微調整して⽬標⾞両動特性に仕上げる。 |
メリット : 燃費効率が良い
モータが動⼒源であり、エンジンの動⼒を使わないため、必要なときだけパワーステアリングを使うことができ、燃費を向上させることが可能になります。
懸念点 : 消費電⼒の増加
EPS を構成する電⼦部品には、「低損失」「⾼耐熱」「⾼精度(温度)」「⼩型化」が要求されています。
EPS の搭載率は今後増加すると⾒込まれており、EPS の制御⾃由性を⽣かした運転⽀援システムへの活⽤などさらに研究が進められると予想されます。

●ガスタービン
ガスタービンはディーゼルエンジンやガソリンエンジンと同じ内燃機関の⼀種であり、吸気・圧縮・燃焼(膨張)・排気というサイクルで作動しています。
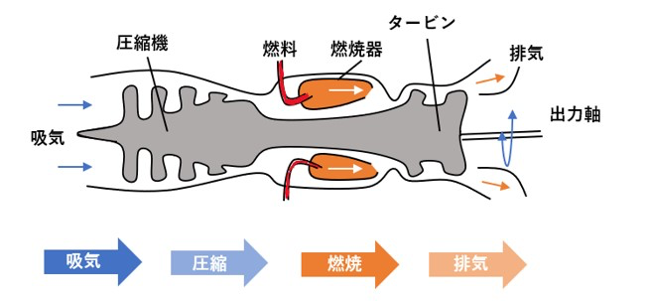
ガスタービンの基本原理:まず空気を遠⼼圧縮機で圧縮し、この圧縮した空気を燃焼器に導いて燃料を連続的に燃焼させて⾼温・⾼圧のガスを発⽣させます。
産業⽤ガスタービンはこのガスをタービンで膨張させて得られる回転エネルギーによって圧縮機をまわすとともに、残りのエネルギーを出⼒軸で取り出します。
Ex)ターボジェットエンジン
・ジェット噴流を利用して推進力を得る
・超音速旅客機、ジェット戦闘機のエンジン
・ガスタービン指導制御へファジィ制御を適用

●ファジィ制御をガスタービン始動制御へ適用した例
ルール1:回転数が低い場合 → 燃料スケジュール調整により燃料流量を操作する
ルール2:回転数が高い場合 → 加速度制御により燃料流量を操作する
ルール3:排ガス温度が高い場合 → 排ガス温度制御により燃料流量を操作する
●ロボット制御
ロボットの動作や挙動を管理することで所定の動作を⾏わせるための技術です。産業⽤ロボットは、その動作形態により分類され、現在では垂直多関節、パラレルリンク、⽔平多関節、直⾓座標のものが多く⽤いられています。
位置制御・・・ロボットアームの⼿先の位置や各関節の⾓度を任意の位置や⾓度に動かすように制御すること。
力制御・・・ロボットアームの手先や各関節に加わる力が適切になるよう制御すること。
位置制御と力制御、二つの制御を組み合わせて動作させることが一般的
Ex)自動車製造での利用例
・ドアの取り付け、エンジンの組み立て、塗装作業など
・高速かつ精密に作業をこなせるため、組み立て効率の向上に期待
ヨシロ機工ホームページをご覧いただきありがとうございます。
お客様のご期待に添えるよう社員一同、努力してまいる所存です。
ご質問などございましたらぜひお気軽にお問合せください。
お問い合わせ:https://www.yoshirokiko.jp/contact/
HPトップ:https://www.yoshirokiko.jp/
自社工場:https://www.yoshirokiko.jp/factory/
会社情報:https://www.yoshirokiko.jp/company/